
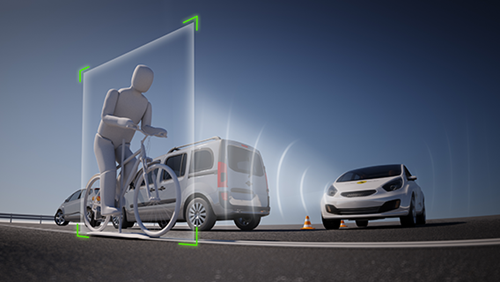
AEB Cyclist
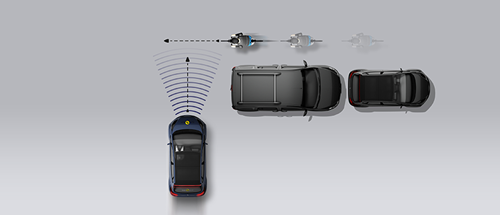
For cyclist detection, Euro NCAP tests several scenarios in which a cyclist is crossing the path of the test vehicle: the cyclist is ahead of the car and approaching from its nearside, and would be struck if the car takes no action to avoid the collision; a similar situation but where the cyclist is initially obscured by vehicles parked on the nearside; and where the cyclist is approaching from the far-side of the test vehicle, towards its path. In addition, two different tests are done where the cyclist is travelling in the same direction as the test vehicle. These scenarios represent typical situations in which potentially fatal accidents might occur between cars and cyclists, and each one presents particular challenges to the AEB system in terms of its range of ‘view’ and speed of response. For this reason, manufacturers may design their systems to avoid collisions, or to reduce their severity, purely by braking or they may also utilise Autonomous Emergency Steering (AES). Like AEB, AES intervenes only when a collision is otherwise unavoidable. A small but rapid steering input is applied, normally in conjunction with braking, to try to avoid the collision. The steering input cannot be enough to put the car in the opposite lane, in the path of oncoming traffic. Similar systems, known as Emergency Steering Support (ESS) exaggerate the steering action taken by the driver in the case of an emergency, to try to avoid a collision.
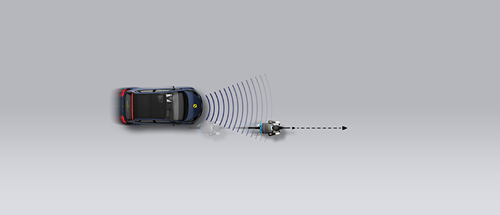
Autonomous Emergency Steering (AES) applies a small but rapid steering input to avoid the collision
A specially designed cyclist target is used for the tests. A bicycle is mounted on a moving platform and the dummy cyclist is articulated to recreate the pedalling action of a human. Detecting cyclists is technically challenging compared to pedestrians as their speeds are higher: vehicle manufacturers must use sensors with wider fields of view and there is less processing time in which to make a decision whether to brake or not. Euro NCAP gives the greatest reward where a collision is completely avoided. In some cases, however, the AEB system will be unable to stop the vehicle completely, and some points are given because any reduction in the speed of impact can have a significant benefit for injury outcome.
Overview of tests
Approaching a cyclist from behind parked vehicles
Introduced in 2020.
Turning across the path of an oncoming cyclist
Introduced in 2023.
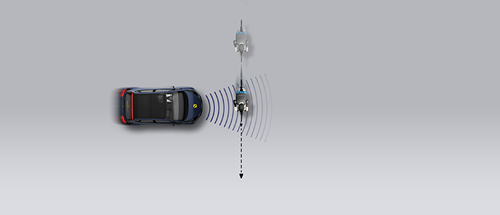
Approaching a crossing cyclist
Introduced in 2020.
Approaching a cyclist along the roadside
Introduced in 2020.
![]() Introduced in 2018. Upgraded in 2023.
Introduced in 2018. Upgraded in 2023.